Sensors and Transducers Course | Birzeit University - Mar 2016.
Team Members: Ahmad Abdelbaset, Ahmad Hajeer
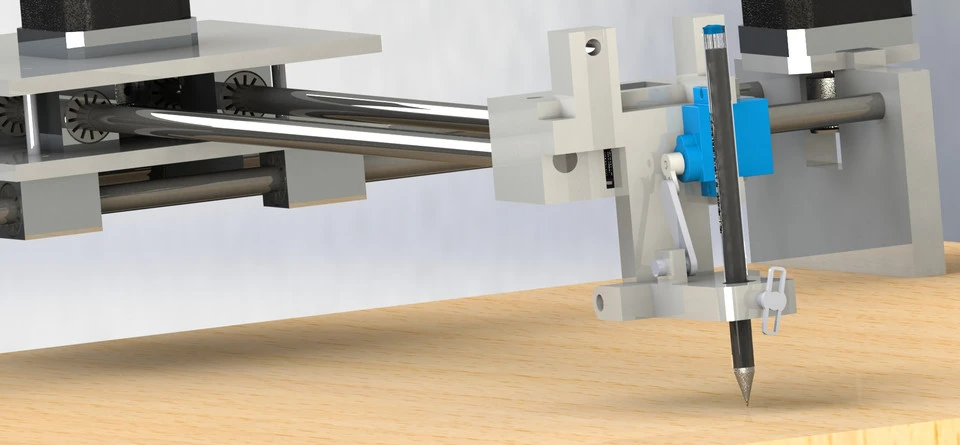
As part of the "Sensors and Transducers" course during my fourth year in the Mechatronics Engineering program, I designed and built an X-Y Plotter—a simple robot capable of drawing 2D shapes on paper using a fixed pencil or pen. The robot receives an image from a computer, converts it into G-code, and translates the code into precise movements to recreate the design on paper.
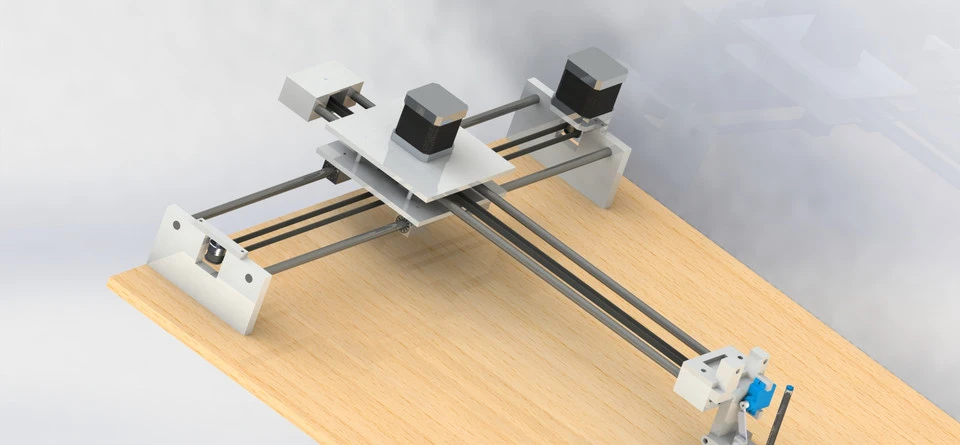
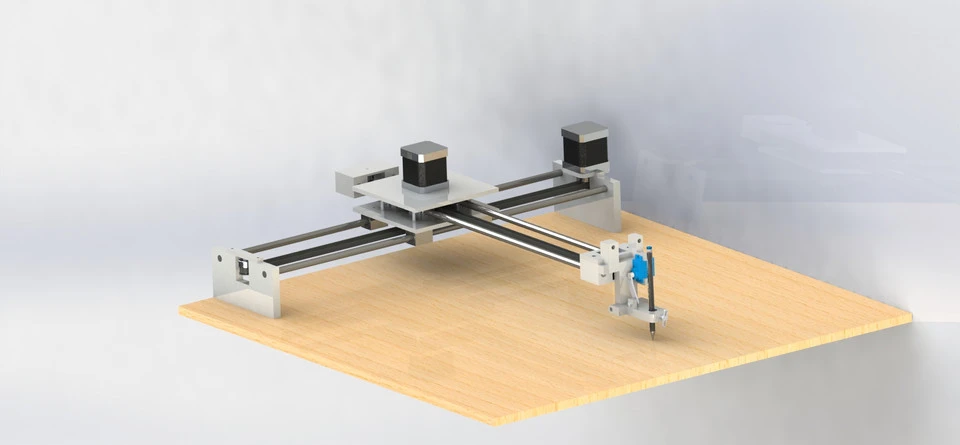
The system was built using two stepper motors connected to timing belts, enabling movement along the X and Y axes, and a servo motor to lift and lower the pencil. An Arduino microcontroller was used to control the motors and interpret the G-code commands, managing the coordinated movement of the robot across the drawing area. The full mechanical structure was designed and modeled using SolidWorks to ensure precision and smooth motion.
Through this project, I strengthened my skills in mechanical design, motor control, G-code interpretation, and embedded programming, while gaining practical experience in integrating sensors and actuators into functional robotic systems.