Mechatronics Systems Design Course | Birzeit University - Feb 2017.
Team Members: Ahmad Abdelbaset, Ahmad Hajeer

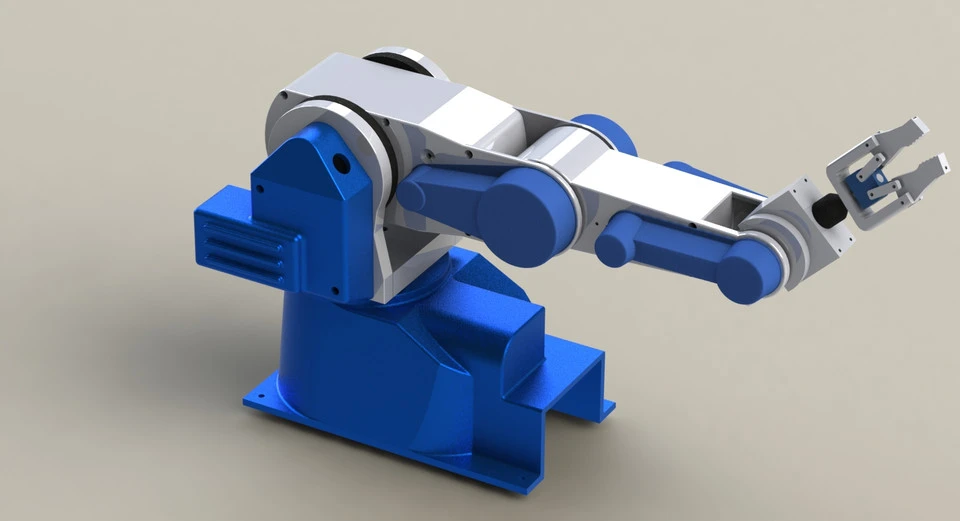
During our fifth year in the Mechatronics Engineering program, we undertook the challenge of reviving an old, non-functional six-degree-of-freedom robotic arm that had been previously used for educational purposes at our university. The arm was no longer operational and consisted only of its metallic frame, with all internal systems—motors, wiring, controller, base, and pneumatic gripper—either missing or broken.
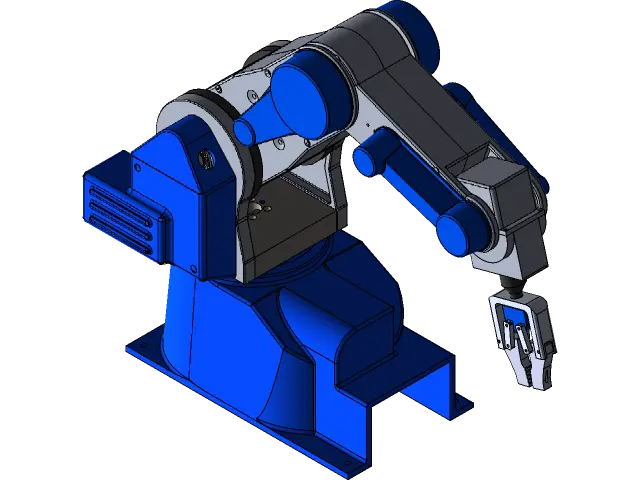
We began by completely dismantling the arm and restoring the mechanical structure, including repainting and reinforcing the frame. We then created a full 3D model using SolidWorks to aid in the redesign and component placement. The motion system was rebuilt using four stepper motors and one servo motor, all integrated and controlled via an Arduino microcontroller using C language.
The original gripper was replaced with a more efficient pneumatic vacuum gripper, enabling the arm to perform pick-and-place tasks with greater precision. Our main challenge was to align the mechanical design with the motion programming, ensuring smooth, coordinated movements across all five axes.
The final result was a fully functional, programmable robotic arm that demonstrated capabilities suitable for basic industrial automation tasks. Through this project, we developed and enhanced our skills in mechanical design, embedded systems programming, and systems integration—gaining real-world experience in robotic system rehabilitation and control.